Procedural Locomotion of Multi-Legged Characters in
Complex Dynamic Environments: Real-Time Applications
Published on: February 23rd, 2014. Updated on: January 16th, 2021.
Abstract:
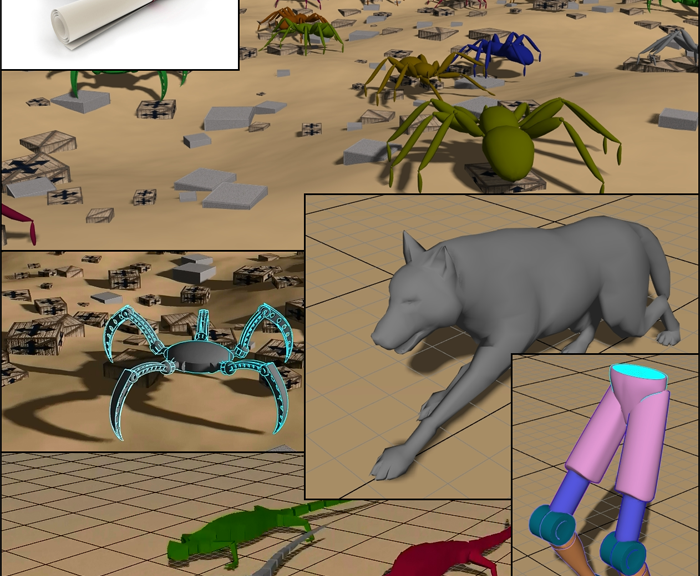
Multi-legged characters like quadrupeds, arachnids, reptiles, etc. are an essential part of any simulation and they greatly participate in making virtual worlds more life-like. These multi-legged characters should be capable of moving freely and in a believable way in order to convey a better immersive experience for the users. But these locomotion animations are quite rich due to the complexity of the navigated environments and the variety of the animated morphologies, gaits, body sizes and proportions, etc. Another challenge when modeling such animations arises from the lack of motion data inherent to either the difficulty to obtain them or the impossibility to capture them.
This thesis addresses these challenges by presenting a system capable of procedurally generating locomotion animations for dozens of multi-legged characters in real-time and without any motion data.
Our system is quite generic thanks to the chosen Procedural-Based techniques and it is capable of animating different multi-legged morphologies. On top of that, the simulated characters have more freedom while moving, as we adapt the generated animations to the dynamic complex environments in real-time. The main focus is plausible movements that are, at the same time, believable and fully controllable. This controllability is one of the forces of our system as it gives the user the possibility to control all aspects of the generated animation thus producing the needed style of locomotion.
Keywords:
Locomotion, Procedural Animation, Multi-Legged Characters, Complex Dynamic Environment, Real-Time, User Style.
Jury Members:
Rapporteurs
Mr. François FAURE
Professeur à l’Université Joseph Fourier
Mr. Jean-Pierre JESSEL
Professeur à l’Université Paul Sabatier
Examinateurs
Mme. Dominique FAUDOT
Professeur à l’Université de Bourgogne
Mr. Serge MIGUET
Professeur à l’Université Lumière Lyon 2
Mr. Axel BUENDIA
Directeur de Spir.Ops, PAST au Cédric/CNAM
Directeur
Mme. Saïda BOUAKAZ
Professeur à l’Université Claude Bernard Lyon 1
Co-encadrant
Mr. Alexandre MEYER
Maître de Conférences à l’Université Claude Bernard Lyon 1
Video:
Bibtex:
@PhDThesis {
AhmadPhD2012,
title = {Procedural Locomotion of Multi-Legged Characters in Complex Dynamic Environments: Real-Time Applications},
author = {Ahmad Abdul Karim},
year = 2012,
month = 10,
school = {Uinversité Claude Bernard Lyon1},
type = {Thèse de Doctorat en Informatique},
language = {en},
url = {http://liris.cnrs.fr/publis/?id=5801},
note = {
Keywords: Locomotion, Procedural Animation, Multi- Legged Characters, Complex Dynamic Environment, Real-Time, User Style.
}
}