Generic Spine Model with Simple Physics for Life-Like Quadrupeds and Reptiles
Ahmad Abdul Karim, Alexandre Meyer, Thibaut Gaudin, Axel Buendia and Saida Bouakaz
Published on: February 23rd, 2014. Updated on: January 16th, 2021.
Abstract:
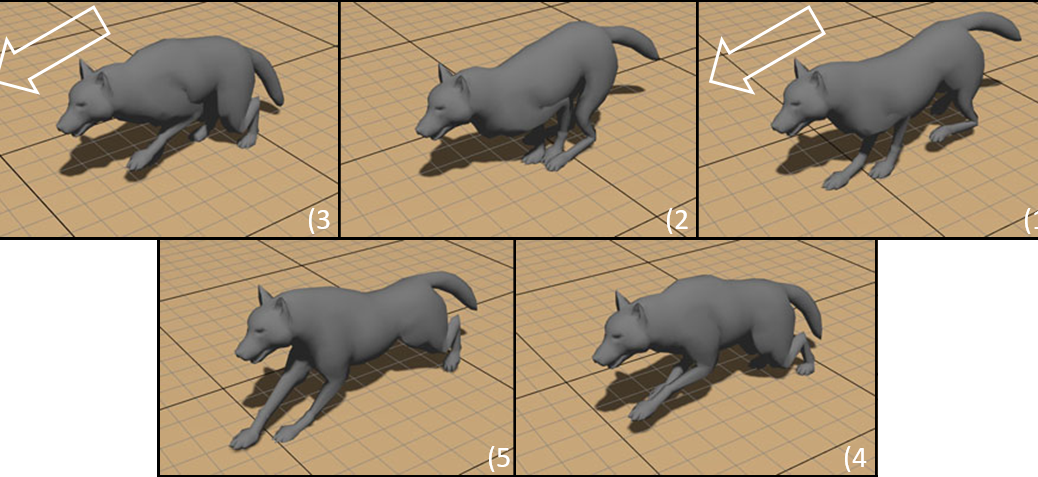
We propose a pseudo-physics system and a spine model that can be coupled to generate life-like locomotion animations of quadrupeds and reptiles. The pseudo-physics system uses minimalist particle based physics and values of the gait pattern to generate the sinusoidal-like ballistic movement of the pelvis observed in nature. While the spine model uses simple geometry-based calculations and 3D Hermite curves to generate a flexible spine model, giving the animated creatures more agility. Our final system is totally controllable by the user in order to generate any desired style.
Video:
Gallery:





Bibtex:
@InProceedings {
AbdulKarim2012,
title = {Generic Spine Model with Simple Physics for Life-Like Quadrupeds and Reptiles},
author = {Ahmad Abdul Karim and Alexandre Meyer and Thibaut Gaudin and Axel Buendia and Saida Bouakaz},
year = 2012,
month = 12,
booktitle = {VRIPHYS 2012: 9th Workshop on Virtual Reality Interaction and Physical Simulation},
language = {en},
url = {http://liris.cnrs.fr/publis/?id=5778},
note = {}
}