Determining the Important Subjective Criteria in the Perception of Human-Like Robot Movements Using Virtual Reality
Olivier Hugues, Vincent Weistroffer, Alexis Paljic, Philippe Fuchs, Ahmad Abdul Karim, Thibaut Gaudin and Axel Buendia
Published on: August 7th, 2016. Updated on: January 16th, 2021.
Abstract:
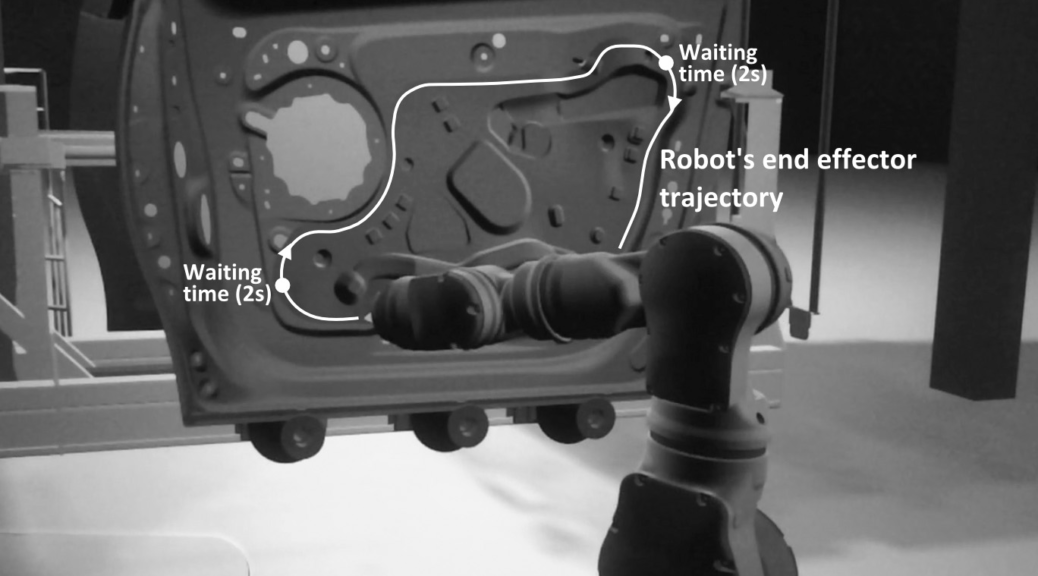
This paper deals with the design and the evaluation of human-like robot movements. Three criteria were proposed and evaluated regarding their impact on the human-likeness of the robot movements: The inertia of the base, the inertia of the end-effector and the velocity profile. A specific tool was designed to generate different levels of anthropomorphism according to these three parameters. An industrial use case was designed to compare several robot movements. This use case was implemented with a virtual robot arm in a virtual environment, using virtual reality. A user study was conducted to determine what were the important criteria in the perception of human-like robot movements and what were their correlations with other notions such as safety and preference. The results showed that inertia on the end-effector was of most importance for a movement to be perceived as human-like and nonaggressive, and that those characteristics helped the users feel safer, less stressed and more willing to work with the robot.
Bibtex:
@article {
BHW15,
title = {Determining the Important Subjective Criteria in the Perception of Human-Like Robot Movements Using Virtual Reality},
author = {A. Buendia and O. Hugues and V. Weistroffer and A. Paljic and A. Abdul Karim and T. Gaudin and P. Fuchs},
journal = {International Journal of Humanoid Robotics},
year = 2015,
volume = 13,
number = 02,
pages = "1-30",
doi = "10.1142/S0219843615500334"
}

